Alat
ini dirancang dengan tujuan:
·
Memenuhi
syarat untuk Modul 4 Praktikum Mikrokontroller & Mikroprosesor
·
Mempermudah lansia
atau orang-orang disabilitas khususnya kesulitan dalam berjalan.
·
Mempermudah
pengguna untuk menghidupkan dan mematikan kipas saat suatu kondisi terpenuhi
·
Membuka
dan menutup gorden saat suatu kondisi terpenuhi
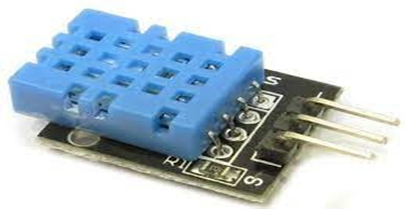
a. DHT 11




h. Baterai

3. Dasar Teori[kembali]
1. Arduino Uno

Gambar 1.Arduino Uno
Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya. Uno berbeda dengan semua board sebelumnya dalam hal koneksi USB-to-serial yaitu menggunakan fitur Atmega8U2 yang diprogram sebagai konverter USB-to-serial berbeda dengan board sebelumnya yang menggunakan chip FTDI driver USB-to-serial.
Nama “Uno” berarti satu dalam bahasa Italia, untuk menandai peluncuran Arduino 1.0. Uno dan versi 1.0 akan menjadi versi referensi dari Arduino. Uno adalah yang terbaru dalam serangkaian board USB Arduino, dan sebagai model referensi untuk platform Arduino, untuk perbandingan dengan versi sebelumnya, lihat indeks board Arduino.
SPESIFIKASI | |
Arduino Uno | |
Microcontroller | ATmega328P |
Operating Voltage | 5V |
Input Voltage (recommended) | 7-12V |
Input Voltage (limit) | 6-20V |
Digital I/O Pins | 14 (of which 6 provide PWM output) |
PWM Digital I/O Pins | 6 |
Analog Input Pins | 6 |
DC Current per I/O Pin | 20 mA |
DC Current for 3.3V Pin | 50 mA |
Flash Memory 32 KB | (ATmega328P) |
SRAM | 2 KB (ATmega328P) |
EEPROM | 1 KB (ATmega328P) |
Clock Speed | 16 MHz |
LED_BUILTIN | 13 |
Length | 68.6 mm |
Width | 53.4 mm |
Weight | |
Arduino Uno dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal (otomatis). Daya Eksternal (non-USB) dapat berasal baik dari AC-ke adaptor-DC atau baterai. Adaptor ini dapat dihubungkan dengan menancapkan plug jack pusat-positif ukuran 2.1mm konektor POWER. Ujung kepala dari baterai dapat dimasukkan kedalam Gnd dan Vin pin header dari konektor POWER. Kisaran kebutuhan daya yang disarankan untuk board Uno adalah7 sampai dengan 12 V, jika diberi daya kurang dari 7 V kemungkinan pin 5 V Uno dapat beroperasi tetapi tidak stabil kemudian jika diberi daya lebih dari 12V, regulator tegangan bisa panas dan dapat merusak board Uno.
Pin listrik adalah sebagai berikut:
· VIN. Tegangan masukan kepada board Arduino ketika itu menggunakan sumber daya eksternal (sebagai pengganti dari 5volt koneksi USB atau sumber daya lainnya).
· 5V. Catu daya digunakan untuk daya mikrokontroler dan komponen lainnya.
· 3v3. Sebuah pasokan 3,3volt dihasilkan oleh regulator on-board.
· GND. Ground pin.Input dan Output
Masing-masing dari 14 pin digital di Uno dapat digunakan sebagai input atau output, dengan menggunakan fungsi pinMode (), digitalWrite (), dan digitalRead (), beroperasi dengan daya 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki internal pull-up resistor (secara default terputus) dari 20-50 kOhms. Selain itu, beberapa pin memiliki fungsi khusus:
· Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) TTL data serial. Pin ini dihubungkan ke pin yang berkaitan dengan chip Serial ATmega8U2 USB-to-TTL.
· Eksternal menyela: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interrupt pada nilai yang rendah, dengan batasan tepi naik atau turun, atau perubahan nilai. Lihat (attachInterrupt) fungsi untuk rincian lebih lanjut.
· PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit dengan fungsi analogWrite ().
· SPI: 10 (SS), 11 (Mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI menggunakan SPI library.
· LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin bernilai nilai HIGH, LED on, ketika pin bernilai LOW, LED off.
Arduino Uno memiliki 6 masukan analog, berlabel A0 sampai dengan A5, yang masing-masing menyediakan 10 bit dengan resolusi (yaitu 1024 nilai yang berbeda). Selain itu, beberapa pin memiliki fungsi khusus:
· I2C: A4 (SDA) dan A5 (SCL). Dukungan I2C (TWI) komunikasi menggunakan perpustakaan Wire.
· Aref. Tegangan referensi (0 sampai 5V saja) untuk input analog. Digunakan dengan fungsi analogReference ().
· Reset. Bawa baris ini LOW untuk me-reset mikrokontroler.
Arduino Uno memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lainnya. Atmega328 menyediakan UART TTL (5V) untuk komunikasi serial, yang tersedia di pin digital 0 (RX) dan 1 (TX). Sebuah Atmega8U2 sebagai saluran komunikasi serial melalui USB dan sebagai port virtual com untuk perangkat lunak pada komputer. Firmware ’8 U2 menggunakan driver USB standar COM, dan tidak ada driver eksternal yang diperlukan. Namun, pada Windows diperlukan, sebuah file inf.
Perangkat lunak Arduino terdapat monitor serial yang memungkinkan digunakan memonitor data tekstual sederhana yang akan dikirim komputer dari board Arduino. LED RX dan TX di papan tulis akan berkedip ketika data sedang dikirim melalui chip USB-to-serial dengan koneksi USB ke komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1). Sebuah SoftwareSerial library memungkinkan untuk berkomunikasi secara serial pada salah satu pin digital pada board Uno. Atmega328 juga mendukung I2C (TWI) dan komunikasi SPI. Perangkat lunak Arduino termasuk perpustakaan Kawat untuk menyederhanakan penggunaan bus I2C, lihat dokumentasi untuk rincian. Untuk komunikasi SPI, menggunakan perpustakaan SPI
2. LM35

Gambar 2. LM35
Sensor suhu LM35 adalah komponen elektronika yang memiliki fungsi untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Sensor Suhu LM35 yang dipakai dalam penelitian ini berupa komponen elektronika elektronika yang diproduksi oleh National Semiconductor. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor suhu yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kendali khusus serta tidak memerlukan penyetelan lanjutan.
Meskipun tegangan sensor ini dapat mencapai 30volt akan tetapi yang diberikan ke sensor adalah sebesar 5 volt, sehingga dapat digunakan dengan catu daya tunggal dengan ketentuan bahwa LM35 hanya membutuhkan arus sebesar 60 µA hal ini berarti LM35 mempunyai kemampuan menghasilkan panas (self-heating) dari sensor yang dapat menyebabkan kesalahan pembacaan yang rendah yaitu kurang dari 0,5 ºC pada suhu 25 ºC.

Gambar 3. Struktur LM35
Tabel 1. Pin LM35

Pada gambar 2 ditunjukan bentuk dari LM35 tampak depan dan tampak bawah. 3 pin LM35 menujukan fungsi masing-masing pin diantaranya, pin 1 berfungsi sebagai sumber tegangan kerja dari LM35, pin 2 atau tengah digunakan sebagai tegangan keluaran atau Vout dengan jangkauan kerja dari 0 Volt sampai dengan 1,5 Volt dengan tegangan operasi sensor LM35 yang dapat digunakan antara 4 Volt sampai 30 Volt. Keluaran sensor ini akan naik sebesar 10 mV setiap derajad celcius sehingga diperoleh persamaan sebagai berikut:
VLM35 = Suhu* 10 mV
Secara prinsip sensor akan melakukan penginderaan pada saat perubahan suhu setiap suhu 1 ºC akan menunjukan tegangan sebesar 10 mV. Pada penempatannya LM35 dapat ditempelkan dengan perekat atau dapat pula disemen pada permukaan akan tetapi suhunya akan sedikit berkurang sekitar 0,01 ºC karena terserap pada suhu permukaan tersebut. Dengan cara seperti ini diharapkan selisih antara suhu udara dan suhu permukaan dapat dideteksi oleh sensor LM35 sama dengan suhu disekitarnya, jika suhu udara disekitarnya jauh lebih tinggi atau jauh lebih rendah dari suhu permukaan, maka LM35 berada pada suhu permukaan dan suhu udara disekitarnya .
Jarak yang jauh diperlukan penghubung yang tidak terpengaruh oleh interferensi dari luar, dengan demikian digunakan kabel selubung yang ditanahkan sehingga dapat bertindak sebagai suatu antenna penerima dan simpangan didalamnya, juga dapat bertindak sebagai perata arus yang mengkoreksi pada kasus yang sedemikian, dengan mengunakan metode bypass kapasitor dari Vin untuk ditanahkan. Berikut ini adalah karakteristik dari sensor LM35:

Gambar 4. Grafik Respon Sensor
Adapun karakteristik sensor LM35 adalah:
· Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10mVolt/ºC sehingga dapat dikalibrasi langsung dalam celcius.
· Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC
· Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
· Bekerja pada tegangan 4 sampai 30 volt.
· Memiliki arus rendah yaitu kurang dari 60 µA.
· Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
· Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
· Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
3. LDR
Light Dependent Resistor atau disingkat dengan LDR adalah jenis Resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi tinggi jika dalam kondisi gelap. Dengan kata lain, fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap.

Gambar 5. LDR
Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang.
LDR (Light Dependent Resistor) yang merupakan Komponen Elektronika peka cahaya ini sering digunakan atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor pada Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter Kamera, Alarm dan lain sebagainya.
Adapun grafik respon sensor adalah:

Gambar 6.Grafik Sensitifitas LDR

Gambar 7. Grafik Spektral LDR
Sebutan lain untuk LDR (Light Dependent Resistor) adalah Photo Resistor, Photo Conduction ataupun Photocell.
4. Driver Motor (L293D)

Gambar 8. Driver Motor
Driver Motor adalah salah satu part mesin produksi sebagai motor penggerak yang berfungsi untuk menggerakkan sebuah benda kerja baik secara langsung ke beban kerja atau melalui perantara beban kerja. aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa
Adapun contoh fungsi dari aplikasi motor drive di beberapa benda kerja adalah sebagai berikut:
- Sebagai penggerak utama gear box.
- Sebagai penggerak utama roll line unit.
- Sebagai penggerak utama roll calender unit.
- Sebagai Penggerak utama pengaduk.
- Sebagai penggerak utama chain atau rantai.
- Sebagai penggerrak utama V Belt drive.
- Sebagai penggerak cyclo drive.
- Dan lain - lain.
Bagian - bagian part dari motor drive adalah sebagai berikut:
- Casing Motor drive, yang berfungsi sebagai rumah kumparan rotor dan stator sekaligus melindungi kumparan unit dari kebocoran barang asing masuk ke area kumparan seperti air.
- Cover Bearing depan dan belakang, yang berfungsi sebagai penutup ruang casing motor bagian depan dan belakang, sekaligus sebagai dudukan bearing shaft rotor.
- Ball Bearing, yang berfungsi sebagai tumpuan pokok dari shaft rotor sekaligus sebagai bagian yang berputar untuk memperingan beban putar dari shaft rotor.
- Terminal kabel joint, Yang berfungsi untuk joint kabel antara motor dengan power supply utama.
- Baut dan nut pengikat, yang berfungsi sebagai pengikat antara cover bearing depan dan belakang dengan casing motor sehingga motor unit terikat kencang menjadi unit.
- Shaft Rotor, yang berfungsi sebagai shaft bagian yang berputar setelah mendapat arus listrik dari kumparan stator.
- Kumparan Stator, yang berfungsi sebagai pembangkit arus untuk di salurkan ke shaft rotor.
- Kipas baling-baling, yang berfungsi sebagai pendingin atau pembuang panas yang timbul akibat proses kerja antara stator dengan rotor.
Menurut Datasheet IC L293D adalah suatu bentuk rangkaian Daya tinggi terintegrasi yang mempu melayani empat buah beban dengan arus antara 600mA sampai dengan 1.2A. Keempat pin Inputnya di desain untuk dapat menerima masukan level logika TTL. IC L293D dapat dipakai sebagai Driver Relay, Motor DC, motor Stepper maupun sebagai pengganti saklar dengan kecepatan switching mencapai 5KHz.
Pada dasarnya, L293D merupakan dua buah rangkaian jembatan-H yang dikemas dalam paket Integrated Circuit. Kedua rangkaian H bridge ini dikontrol oleh sebuah pin bernama Enable.

Gambar 9.Struktur L293D
Cara kerja rangkaian Driver motor menggunakan IC ini adalah:
- IC akan merespon sinyal input 1 dan input 2 ketika pin Enable 1 diberi logika HIGH. Jika diberi logika Low maka Motor 1 tidak akan berputar.
- Ketika Input 1 dan input 2 diberikan input logika yang berbeda (Low dan high atau sebaliknya) maka motor akan berputar.
- Ketika Ketika Input 1 dan input 2 diberikan logika yang berlawanan maka motor akan berputar berlawanan arah dari sebelumnya.
- IC akan merespon sinyal input 3 dan input 4 ketika pin Enable 2 diberi logika HIGH. Jika diberi logika Low maka Motor 2 tidak akan berputar.
- Ketika Input 3 dan input 4 diberikan input logika yang berbeda (Low dan high atau sebaliknya) maka motor akan berputar.
- Ketika Ketika Input 3 dan input 4 diberikan logika yang berlawanan maka motor akan berputar berlawanan arah dari sebelumnya.
- Syarat motor motor berputar adalah logika input berlawanan. Jika logika input sama-sama High atau sama-sama Low maka Motor tidak akan berputar.
- Putaran motor searah jarum jam disebut Clock Wise (CW), sedangkan putaran motor yang berlawanan arah jarum jam disebut Counter Clock Wise (CCW).
5. Motor

Gambar 10. Motor
Motor listrik adalah mesin yang mengubah energi listrik menjadi energi mekanik atau tenaga penggerak atau tenaga pemutar. Dalam peralatan rumah tangga motor listrik dapat ditemukan contohnya: pengering rambut kipas angin, mesin cuci, mesin jahit, pompa air, blender, mixer, bor listrik, lemari es, dan penyedot debu. Sedangkan dalam industri motor listrik digunakan untuk impeller pompa, fan, blower, menggerakan kompresor, mengangkat beban dan lain-lain.
John Ambrose Fleming diakhir abad 19, memperkenalkan sebuah cara untuk memudahkan memahami cara kerja motor listrik. Yang disebut kaidah tangan kiri, kaidah ini memudahkan untuk mengetahui arah gaya dorong/lorentz, arah medan magnet dan arah arus listrik pada sebuah sistem induksi elektromagnetik. Berikut gambar kaidah tangan kiri.

Gambar 11.Aturan Tangan Kiri
Prinsip kerja motor listrik adalah mengubah tenaga listrik menjadi tenaga mekanik. Perubahan dilakukan dengan merubah tenaga listrik menjadi magnet yang disebut elektromagnit. Menurut sifatnya, kutub-kutub magnit senama akan tolak-menolak dan kutub-kutub tidak senama akan tarik-menarik. Sehingga jika sebuah magnet ditempatkan pada sebuah poros yang berputar dan magnet lainnya pada suatu kedudukan yang tetap maka akan diperoleh gerakan atau putaran.
Ada banyak bagian motor listrik tapi, sejatinya motor listrik hanya memiliki komponen utama yaitu stator dan rotor. Berikut ini bagian-bagian motor listrik:
· Stator.Adalah bagian dari motor listrik yang tidak bergerak stator penghasil medan magnet, baik itu elekromagnetik ataupun medan magnet tetap. Stator terdiri dari beberapa bagian yaitu :
a) Badan Motor, adalah tempat lilitan stator.terdiri dari rumah dengan alur-alurnya yang dibuat dari pelat-pelat yang dipejalkan berikut tutupnya.
b) Kumparan Stator, adalah elektromagnetik berfungsi sebagai penghasil medan magnet bias diganti dengan medan magnet tetap yang memiliki dua kutub magnet yang saling berhadapan, kutub utara dan kutub selatan
· Rotor. adalah bagian dari motor listrik yang bergerak, rotor terdiri dari beberapa bagian yaitu
a) Sikat, untuk menghubungkan arus dari sumber tegangan ke komutator dari kumparan.
b) Komutator, untuk mengubah/membalik arah arus yang mengalir pada kumparan agar putaran motor dapat terjadi. (Tidak bergerak bolak-balik) dan membantu dalam transmisi arus antara rotor dengan sumber daya.
· Terminal adalah titik penyambungan sumber tenaga listrik dengan ujung kumparan motor.
· Bearing adalah bantalan AS motor
· Body Motor adalah tutup motor untuk pelindung dari lingkungan.
· Celah Udara adalah jarak antara kedudukan stator dengan rotor.
Berikut ini gambar bagian-bagian motor listrik:

Gambar 12. Struktur Motor
Pada dasarnya motor listrik dibedakan dari jenis sumber tegangannya motor listrik terbagi 2 yaitu: Motor AC {Alternating Current} atau Motor Listrik Arus Bolak-Balik danMotor DC {Direct Current} atau Motor Listrik Arus Searah. Dari 2 jenis motor listrik tersebut terdapat klasifikasi jenis-jenis motor listrik berdasarkan prinsip kerja, konstruksi, operasi dan karakternya. Seperti yang terlihat gambar dibawah ini:

Gambar 13. Jenis-Jenis Motor
Motor DC adalah jenis motor listrik yang memerlukan sumber tegangan DC untuk beroperasi. Motor DC dibedakan lagi dari sumber dayanya yaitu sebagai berikut:
· Separately Excited atau Motor DC Sumber Daya Terpisah.
· Self Excited atau Motor DC Sumber Daya Sendiri berdasarkan konfigurasi supply medan dengan kumparan motor, Motor DC Self Excited dibedakan lagi yaitu sebagai berikut :
- Motor DC Seri. Jenis motor yang gulungan medannya dihubungkan secara seri dengan gulungan kumparan motor,
- Motor DC Shunt. Jenis motor yang gulungan medannya dihubungkan secara pararel dengan gulungan kumparan motor
- Motor DC Campuran/Kompon. Jenis motor yang gulungan medan dihubungkan secara pararel dan seri dengan gulungan motor listri.
Motor AC adalah jenis motor listrik yang memerlukan sumber tegangan AC untuk beroperasi. Motor AC dibedakan lagi dari sumber dayanya yaitu sebagai berikut:
· Motor Sinkro (Motor Serempak), jenis motor ac yang bekerja pada kecepatan tetap pada sistem frekuensi tertentu, motor jenis memiliki torsi yang rendah dan memerlukan arus dc untuk pembangkitan daya.
· Motor Induksi (Motor Tak Serempak), merupakan motor listrik AC yang bekerja berdasarkan induksi medan magnet antara rotor dan stator. Motor induksi dapat diklasifikasikan menjadi dua kelompok utama sebagai berikut :
a) Motor 1 Fasa, motor yang beroperasi dengan daya 1 fasa untuk menghasilkan tenaga mekanik.
b) Motor 3 Fasa, motor yang beroperasi dengan daya 3 fasa untuk menghasilkan tenaga mekanik.
6. LCD

Gambar 14.LCD
LCD atau Liquid Crystal Display adalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD) atau Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti layar Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar Multimeter, Monitor Komputer, Televisi, layar Game portabel, layar Thermometer Digital dan produk-produk elektronik lainnya.
Teknologi Display LCD ini memungkinkan produk-produk elektronik dibuat menjadi jauh lebih tipis jika dibanding dengan teknologi Tabung Sinar Katoda (Cathode Ray Tube atau CRT). Jika dibandingkan dengan teknologi CRT, LCD juga jauh lebih hemat dalam mengkonsumsi daya karena LCD bekerja berdasarkan prinsip pemblokiran cahaya sedangkan CRT berdasarkan prinsip pemancaran cahaya. Namun LCD membutuhkan lampu backlight (cahaya latar belakang) sebagai cahaya pendukung karena LCD sendiri tidak memancarkan cahaya. Beberapa jenis backlight yang umum digunakan untuk LCD diantaranya adalah backlight CCFL (Cold cathode fluorescent lamps) dan backlight LED (Light-emitting diodes).
LCD atau Liquid Crystal Display pada dasarnya terdiri dari dua bagian utama yaitu bagian Backlight (Lampu Latar Belakang) dan bagian Liquid Crystal (Kristal Cair). Seperti yang disebutkan sebelumnya, LCD tidak memancarkan pencahayaan apapun, LCD hanya merefleksikan dan mentransmisikan cahaya yang melewatinya. Oleh karena itu, LCD memerlukan Backlight atau Cahaya latar belakang untuk sumber cahayanya. Cahaya Backlight tersebut pada umumnya adalah berwarna putih. Sedangkan Kristal Cair (Liquid Crystal) sendiri adalah cairan organik yang berada diantara dua lembar kaca yang memiliki permukaan transparan yang konduktif.
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah:
- Lapisan Terpolarisasi 1 (Polarizing Film 1)
- Elektroda Positif (Positive Electrode)
- Lapisan Kristal Cair (Liquid Cristal Layer)
- Elektroda Negatif (Negative Electrode)
- Lapisan Terpolarisasi 2 (Polarizing film 2)
- Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD:

Gambar 15.Struktur LCD
LCD yang digunakan pada Kalkulator dan Jam Tangan digital pada umumnya menggunakan Cermin untuk memantulkan cahaya alami agar dapat menghasilkan digit yang terlihat di layar. Sedangkan LCD yang lebih modern dan berkekuatan tinggi seperti TV, Laptop dan Ponsel Pintar menggunakan lampu Backlight (Lampu Latar Belakang) untuk menerangi piksel kristal cair. Lampu Backlight tersebut pada umumnya berbentuk persegi panjang atau strip lampu Flourescent atau Light Emitting Diode (LED). Cahaya putih adalah cahaya terdiri dari ratusan cahaya warna yang berbeda. Ratusan warna cahaya tersebut akan terlihat apabila cahaya putih mengalami refleksi atau perubahan arah sinar. Artinya, jika beda sudut refleksi maka berbeda pula warna cahaya yang dihasilkan.
Backlight LCD yang berwarna putih akan memberikan pencahayaan pada Kristal Cair atau Liquid Crystal. Kristal cair tersebut akan menyaring backlight yang diterimanya dan merefleksikannya sesuai dengan sudut yang diinginkan sehingga menghasilkan warna yang dibutuhkan. Sudut Kristal Cair akan berubah apabila diberikan tegangan dengan nilai tertentu. Karena dengan perubahan sudut dan penyaringan cahaya backlight pada kristal cair tersebut, cahaya backlight yang sebelumnya adalah berwarna putih dapat berubah menjadi berbagai warna.
Jika ingin menghasilkan warna putih, maka kristal cair akan dibuka selebar-lebarnya sehingga cahaya backlight yang berwarna putih dapat ditampilkan sepenuhnya. Sebaliknya, apabila ingin menampilkan warna hitam, maka kristal cair harus ditutup serapat-rapatnya sehingga tidak adalah cahaya backlight yang dapat menembus. Dan apabila menginginkan warna lainnya, maka diperlukan pengaturan sudut refleksi kristal cair yang bersangkutan.
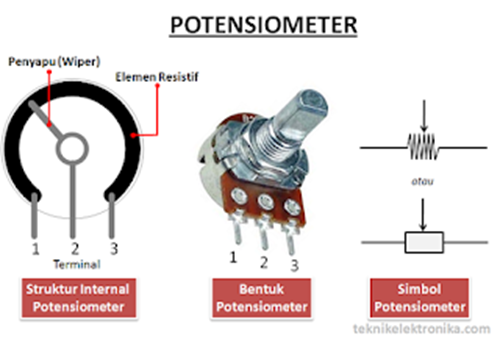
7. Potensiometer

Gambar 16.Potensiometer
Potensiometer adalah salah satu jenis Resistor yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan Rangkaian Elektronika ataupun kebutuhan pemakainya. Potensiometer merupakan Keluarga Resistor yang tergolong dalam Kategori Variable Resistor. Secara struktur, Potensiometer terdiri dari 3 kaki Terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya. Gambar dibawah ini menunjukan Struktur Internal Potensiometer beserta bentuk dan Simbolnya.
Pada dasarnya bagian-bagian penting dalam Komponen Potensiometer adalah:
· Penyapu atau disebut juga dengan Wiper
· Element Resistif
· Terminal
Berdasarkan bentuknya, Potensiometer dapat dibagi menjadi 3 macam, yaitu:
1. Potensiometer Slider, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara menggeserkan Wiper-nya dari kiri ke kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan Ibu Jari untuk menggeser wiper-nya.
2. Potensiometer Rotary, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara memutarkan Wiper-nya sepanjang lintasan yang melingkar. Biasanya menggunakan Ibu Jari untuk memutar wiper tersebut. Oleh karena itu, Potensiometer Rotary sering disebut juga dengan Thumbwheel Potentiometer.
3. Potensiometer Trimmer, yaitu Potensiometer yang bentuknya kecil dan harus menggunakan alat khusus seperti Obeng (screwdriver) untuk memutarnya. Potensiometer Trimmer ini biasanya dipasangkan di PCB dan jarang dilakukan pengaturannya.

Gambar 17. Jenis-Jenis Potensometer
Sebuah Potensiometer (POT) terdiri dari sebuah elemen resistif yang membentuk jalur (track) dengan terminal di kedua ujungnya. Sedangkan terminal lainnya (biasanya berada di tengah) adalah Penyapu (Wiper) yang dipergunakan untuk menentukan pergerakan pada jalur elemen resistif (Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif inilah yang mengatur naik-turunnya Nilai Resistansi sebuah Potensiometer.
Elemen Resistif pada Potensiometer umumnya terbuat dari bahan campuran Metal (logam) dan Keramik ataupun Bahan Karbon (Carbon). Berdasarkan Track (jalur) elemen resistif-nya, Potensiometer dapat digolongkan menjadi 2 jenis yaitu Potensiometer Linear (Linear Potentiometer) dan Potensiometer Logaritmik (Logarithmic Potentiometer).
Dengan kemampuan yang dapat mengubah resistansi atau hambatan, Potensiometer sering digunakan dalam rangkaian atau peralatan Elektronika dengan fungsi-fungsi sebagai berikut:
· Sebagai pengatur Volume pada berbagai peralatan Audio/Video seperti Amplifier, Tape Mobil, DVD Player.
· Sebagai Pengatur Tegangan pada Rangkaian Power Supply
· Sebagai Pembagi Tegangan
· Aplikasi Switch TRIAC
· Digunakan sebagai Joystick pada Tranduser
· Sebagai Pengendali Level Sinyal
8. Baterai

Gambar 18. Baterai
Baterai adalah kumpulan dari satu atau lebih sel yang hasil dari reaksi kimianya membuat elektron mengalir didalam rangkaian. Semua jenis baterai terdiri dari tiga komponen dasar, yaitu; Anoda (sisi 'Negatif'), Katoda (sisi 'Positif'), dan beberapa jenis elektrolit (sebuah zat yang secara kimia bereaksi terhadap anoda dan katoda).
Ketika anoda dan katoda baterai terhubung ke rangkaian, reaksi kimia terjadi antara sisi anoda dengan elektrolit. Reaksi ini menyebabkan elektron mengalir melalui rangkaian menuju ke katoda dan hal ini menyebabkan reaksi kimia lain terjadi antara sisi katoda dengan elektrolit. Ketika bahan di katoda dan atau anoda habis di konsumsi akibat dari reaksi kimia yang terjadi di kedua sisi, maka reaksi pun berhenti. Ketika reaksi kimia berhenti, baterai tidak dapat lagi menghasilkan listrik. Saat seperti ini Baterai menjadi "mati".
Pada dasarnya baterai terdiri dari 2 jenis, yaitu baterai primer dan baterai sekunder. Baterai primer adalah baterai yang harus dibuang setelah digunakan atau sudah dalam keadaan mati. Reaksi kimia sudah tidak dapat dibangkitkan lagi pada baterai primer. Sedangkan baterai sekunder adalah baterai yang dapat diisi ulang (recharge). Reaksi kimia pada baterai jenis ini dapat dibangkitkan kembali setelah baterai "mati".

Gambar 19. Jenis-Jenis Baterai
Penemuan baterai modern sering dikaitkan dengan seseorang yang bernama Alessandro Volta.
Baterai terdiri dari tiga komponen dasar, yaitu: Anoda, Katoda, dan Elektrolit. Sebuah pemisah (separator) sering digunakan untuk mencegah anoda dan katoda saling bersentuhan ketika elektrolit tidak mencukupi (hingga habis). Untuk menyimpan ketiga komponen dasar ini, baterai disimpan dalam sebuah wadah (casing) yang memiliki bermacam bentuk unik.

Gambar 20. Struktur Baterai
Anoda dan katoda adalah jenis elektroda. Elektroda adalah konduktor yang mampu mengalirkan listrik baik itu memasuki atau meninggalkan komponen dalam sebuah rangkaian kelistrikan.
· Anoda (Sifat Negatif)
Elektron bergerak keluar dari anoda menuju ke perangkat yang terhubung didalam sirkuit. Ini berarti secara konvensional "arus" mengalir masuk ke anoda.

Gambar 21.Anoda
Didalam baterai, reaksi kimia yang terjadi antara anoda dan elektrolit menyebabkan terbentuknya elektron didalam anoda. Elektron tersebut sebenarnya ingin bergerak menuju ke katoda, tetapi tidak mampu melewati elektrolit atau pemisah. Hal ini menyebabkan elektron harus mengalir melalui komponen yang terhubung didalam rangkaian hingga sampai ke katoda.
· Katode (Sifat Positif)
Elektron bergerak masuk ke dalam katoda dari perangkat yang terhubung didalam sirkuit. Ini berarti secara konvensional "arus" mengalir keluar dari katoda.

Gambar 22.Katoda
Didalam baterai, reaksi kimia yang terjadi antara katoda dan elektrolit membutuhkan elektron yang dihasilkan oleh anoda. Tanpa elektron dari anoda maka tidak akan terjadi reaksi kimia antara katoda dengan elektrolit. Satu-satunya jalan elektron untuk bisa sampai ke katoda adalah melewati rangkaian yang berada diluar baterai. Pergerakan elektron inilah yang kemudian dikenal dengan nama "listrik".
· Elektrolit
Elektrolit adalah zat, bisa berupa cairan atau gel, yang mampu mengangkut ion saat terjadi reaksi kimia pada sisi anoda dan katoda. Elektrolit juga bertindak sebagai insulator listrik antara anoda dan katoda sehingga elektron lebih mudah mengalir melalui sirkuit eksternal (diluar baterai) daripada harus melalui elektrolit.

Gambar 23. Elektrolit
Elektrolit sangat berperan penting dalam kinerja baterai. Karena elektron tidak dapat melewati elektrolit, mereka dipaksa untuk melakukan perjalanan melalui konduktor listrik didalam sirkuit diluar baterai yang menghubungkan anoda ke katoda.
· Separator (Pemisah)
Separator adalah bahan berpori yang mencegah anoda dan katoda saling bersentuhan yang akan menyebabkan hubungan singkat (korsleting atau short circuit) didalam baterai. Separator baterai dibuat dari beberapa bahan seperti; kapas, nilon, polyester, kardus, dan film polimer sintetik. Separator tidak bereaksi secara kimia dengan anoda, katoda, ataupun elektrolit.

Gambar 24. Separator
Ion didalam elektrolit dapat bermuatan positif, bermuatan negatif, dan dapat datang dalam berbagai ukuran. Separator khusus biasanya dibuat untuk memungkinkan beberapa ion dapat melewatinya dengan baik namun yang lainnya tidak.
· Casing (Wadah)
Casing baterai dapat dibuat hampir dari semua bahan: plastik, baja, laminasi polimer ringan, dan sebagainya. Beberapa baterai menggunakan casing konduktor baja yang secara elektrik terhubung kesalah satu elektroda. Sebagai contoh, umumnya sel baterai AA alkaline menggunakan casing baja yang terhubung ke katoda.

Gambar 25.Wadah Baterai
Baterai membutuhkan reaksi kimia untuk beroperasi. Setidaknya satu reaksi terjadi disekitar anoda dan satu atau lebih reaksi terjadi disekitar katoda. Pada saat baterai berkerja, reaksi pada anoda menghasilkan banyak sekali elektron yang disebut proses oksidasi (oxidation). Sedangkan reaksi yang terjadi pada katoda menggunakan banyak sekali elektron selama baterai bekerja, proses ini dikenal dengan proses reduksi (reduction).

Gambar 26. Prinsip Kerja Baterai
Pada intinya, kita membagi jenis reaksi kimia tertentu, reaksi reduksi-oksidasi atau sering disebut juga reaksi redoks (red-uksi oks-idasi), menjadi dua bagian reaksi terpisah. Reaksi redoks terjadi ketika elektron ditransfer diantara bahan kimia. Kemudian pergerakan elektron dalam reaksi ini mengalir keluar baterai untuk memberikan daya pada sirkuit.
Inter Integrated Circuit atau sering disebut I2C adalah standar komunikasi serial dua arah menggunakan dua saluran yang didisain khusus untuk mengirim maupun menerima data. Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang membawa informasi data antara I2C dengan pengontrolnya. Piranti yang dihubungkan dengan sistem I2C Bus dapat dioperasikan sebagai Master dan Slave. Master adalah piranti yang memulai transfer data pada I2C Bus dengan membentuk sinyal Start, mengakhiri transfer data dengan membentuk sinyal Stop, dan membangkitkan sinyal clock. Slave adalah piranti yang dialamati master.
Sinyal Start merupakan sinyal untuk memulai semua perintah, didefinisikan sebagai perubahan tegangan SDA dari “1” menjadi “0” pada saat SCL “1”. Sinyal Stop merupakan sinyal untuk mengakhiri semua perintah, didefinisikan sebagai perubahan tegangan SDA dari “0” menjadi “1” pada saat SCL “1”. Kondisi sinyal Start dan sinyal Stop seperti tampak pada Gambar 1.

Gambar 27. Kondisi Sinyal Start dan Stop
Sinyal dasar yang lain dalam I2C Bus adalah sinyal acknowledge yang disimbolkan dengan ACK Setelah transfer data oleh master berhasil diterima slave, slave akan menjawabnya dengan mengirim sinyal acknowledge, yaitu dengan membuat SDA menjadi “0” selama siklus clock ke 9. Ini menunjukkan bahwa Slave telah menerima 8 bit data dari Master. Kondisi sinyal acknowledge seperti tampak pada Gambar 2.

Gambar 28. Sinyal ACK dan NACK
Dalam melakukan transfer data pada I2C Bus, kita harus mengikuti tata cara yang telah ditetapkan yaitu:
- Transfer data hanya dapat dilakukan ketikan Bus tidak dalam keadaan sibuk.
- Selama proses transfer data, keadaan data pada SDA harus stabil selama SCL dalam keadan tinggi. Keadaan perubahan “1” atau “0” pada SDA hanya dapat dilakukan selama SCL dalam keadaan rendah. Jika terjadi perubahan keadaan SDA pada saat SCL dalam keadaan tinggi, maka perubahan itu dianggap sebagai sinyal Start atau sinyal Stop.

Gambar 29. Transfer Bit pada I2C Bus
4. Listining Program[kembali]
-
Master
#include <Wire.h> //Inisialisasi library Wire.h
#include <DHT.h>
DHT dht(8,DHT11); //Pin, Jenis DHT
#include <LiquidCrystal.h> //Inisialisasi library LiquidCrystal.h
LiquidCrystal lcd(2,3,4,5,6,7); //Deklarasi pin yang terhubung ke LCD
#define ldr_out A1 //deklarasi pin A1 untuk ldr_out
#define ldr_in A2 //deklarasi pin A2 untuk ldr_in
#define touch 13
#define buzzer 9
#define en1 12
#define in1 11
#define in2 10
int valueldr_out, valuelm35, valueldr_in, valueldr,valuetouch; //deklarasi variabel-variabel
boolean x,y; //deklarasi variabel x dengan tipe boolean
void setup() { //eksekusi program hanya dilakukan sekali
Serial.begin(9600); //Set baud rate
dht.begin();
pinMode(ldr_out, INPUT); //deklarasi ldr_out sebagai input
pinMode(ldr_in, INPUT); //deklarasi ldr_in sebagai input
pinMode(touch,INPUT);
pinMode(buzzer,OUTPUT);
pinMode(en1,OUTPUT);
pinMode(in1,OUTPUT);
pinMode(in2,OUTPUT);
Wire.begin(); //Inisiasi library Wire
lcd.begin(16,2);
}
void slave1(){ //Fungsi untuk slave1
Wire.beginTransmission(1); //Memulai transmisi ke slave1
Wire.write(x); //Membariskan data variabel x untuk dikirim ke slave
Wire.endTransmission(); //Menghentikan transmisi data
}
void loop() { //Fungsi dieksekusi berulang
float suhu = dht.readTemperature();
lcd.setCursor (0,0); //Memulai pada kolom 0 baris 0 lcd
lcd.print ("Suhu :"); //Menulis kata “Suhu :”
lcd.setCursor (5,0); //Memulai pada kolom 0 baris 1 lcd
lcd.print(suhu); //Menulis nilai variable; lm35
delay(100);
if (suhu > 30){ //Kondisi apabila nilai lm35 lebih besar dari 25 derajat
digitalWrite (en1,20);
digitalWrite (in1,LOW);
digitalWrite (in2,HIGH);
}
else if (suhu <=30 && suhu>=25){ //Apabila nilai lm lebih besari dari 30 derajat
digitalWrite (en1,10);
digitalWrite (in1,LOW);
digitalWrite (in2,HIGH);}
else if (suhu < 25 )
{ //Kondisi apabila nilai lm35 lebih besar dari 25 derajat
digitalWrite (en1,0);
digitalWrite (in1,LOW);
digitalWrite (in2,LOW);
}
{
valueldr_out = analogRead(ldr_out); //Memasukkan nilai pembacaan ldr_out ke variabel valueldr_out
valueldr_in = analogRead(ldr_in); //Memasukkan nilai pembacaan ldr_in ke variabel valueldr_in
if (valueldr_out > valueldr_in) { //Kondisi apabila nilai valueldr_out lebih besar dari valueldr_in
x = true; //Maka x bernilai true
}
else if(valueldr_out < valueldr_in) //Untuk kondisi valueldr_out lebih kecil atau sama dengan valueldr_in
x = false; //Maka x bernilai false
{
int valuetouch = digitalRead(touch);
if (valuetouch == 1) { //Kondisi apabila nilai valueldr_out lebih besar dari valueldr_in
digitalWrite (buzzer,HIGH);
}
else { //Untuk kondisi valueldr_out lebih kecil atau sama dengan valueldr_in
digitalWrite (buzzer,LOW);
}
}
slave1();
}
}
SLAVE
#include <Wire.h> //Inisialisasi library Wire.h
#define en2 9
#define in1 7 //Deklarasi pin 7 untuk in1
#define in2 6 //Deklarasi pin 6 untuk in2
#define en1 5 //Deklarasi pin 5 untuk en1
#define in3 3
#define in4 4
int x, valuelm35; //Deklarasi variabel x
const byte slaveId = 1; //deklarasi alamat slave1
void setup() { //Fungsi dieksekusi sekali
Serial.begin(9600); //Set baud rate
pinMode(in1, OUTPUT); //Deklarasi in1 sebagai output
Wire.begin (slaveId); //Memulai library
Wire.onReceive(receiveEvent); //Memanggil fungsi ketika slave menerima transmisi dari master
}
void receiveEvent(){ //Fungsi dijalankan saat master mentransmisikan data
x = Wire.read(); //memasukkan data yang ditransmisikan ke variabel x
valuelm35 = x*0.488;
}
void loop() { //Fungsi dieksekusi berulang
if (x == true){ // kondisi apabila x bernilai true
digitalWrite (en1, 5); //en1 diaktifkan
digitalWrite (in1, HIGH); //in1 berlogika 1 atau HIGH
digitalWrite (in2, LOW); //in2 berlogika 0 atau LOW
}
else { //Kondisi x bernilai false
digitalWrite (en1, 5); //en1 diaktifkan
digitalWrite (in1, LOW); //in1 berlogika 0 atau LOW
digitalWrite (in2, HIGH); //in2 berlogika 1 atau HIGH
}
}







Sistem
kontrol kamar pasien otomatis ini
mempunyai prinsip kerja yaitu rangkaian
ini berfungsi untuk kontrol motor yang terhubung ke gorden dan juga kontrol
kipas angin. Pada rangkaian terdapat 2
arduino uno. Dimana 1 arduino sebagai master, dan satu arduino sebagai slave. Master terhubung
ke LDR1, LDR2 dan sensor suhu DHT 11.
Slave terhubung ke driver motor untuk kontrol motor pada gorden, serta terhubung ke lcd dan juga driver motor yang mengatur
kipas. Pada sistem digunakan dua buah LDR. LDR 1 diletakkan di dalam ruangan
dan LDR 2 diletakkan di luar ruangan. Sistem ini berkomunikasi menggunakan
jenis komunikasi I2C (Inter Integrated Circuit).
Untuk
kontrol gorden, digunakan perbandingan intensitas cahaya yang diterima LDR1 dan
LDR2. LDR1 mendapat cahaya dari cahaya yang ada di dalam ruangan, sedangkan
LDR2 mendapatkan cahaya dari cahaya matahari di luar ruangan. Saat intensitas
cahaya yang diterima LDR1 (dalam ruangan) lebih kecil dari LDR2 (luar ruangan)
menandakan matahari sudah terbit maka intensitas cahaya yang diterima LDR2
lebih besar. Data tersebut dikirimkan dari master ke slave 1, motor yang
terhubung ke gorden akan berputar searah jarum jam dan membuka gorden. Untuk
kondisi sebaliknya, saat intensitas cahaya yang diterima LDR1 (dalam ruangan)
lebih besar dari LDR2 (luar ruangan) menandakan matahari sudah mulai terbenam maka
intensitas cahaya yang diterima LDR2 lebih kecil, data kemudian dikirimkan dari
master ke slave 1, motor yang terhubung ke gorden akan berputar berlawanan dari
arah jarum jam dan menutup gorden.
Untuk
kontrol kipas, digunakan hasil pembacaan dari DHT 11. Saat DHT11 mengukur suhu
ruangan berada di atas 25°C, maka data pembacaan dari master akan dikirim ke
slave 2, hasil pembacaan akan ditampilkan pada lcd, dan motor kipas akan
berputar. Untuk kondisi lain, ketika suhu ruangan naik hingga 30°C, maka motor
akan berputar lebih cepat. Sedangkan untuk suhu dibawah 20°C, motor kipas akan
berhenti berputar.
Berdasarkan
percobaan yang telah dilakukan, perancangan sistem kontrol kamar pasien otomatis dapat
dilakukan dengan pengaplikasiaan materi yang telah dipelajari saat praktikum
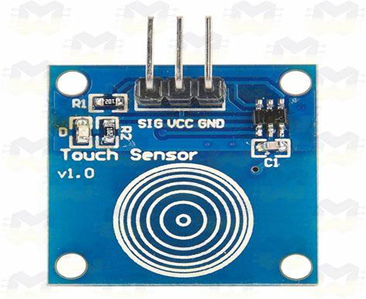
seperti komunikasi pada Arduino dan dengan menggunakan DHT11, LDR dan touch sensor. Perancangan yang dibuat dalam bentuk prototypr
ini bertujuan untuk mempermudah dalam
mengontrol kelembaban tanah dan kecukupan airnya.


Tidak ada komentar:
Posting Komentar